=========================
ЗОНА АРДУИНО: домашнее задание к 03.02.18 читать Зона АРДУИНО: Датчики линии на нашем роботе и Зона Ардуино: Движение по линии
ЗОНА АРДУИНО: домашнее задание к 13.01.18 читать обязательно про функции и про модернизацию форм управления все непонятные слова записать в тетрадь + читать, внимательно читать инструкцию по проверке скетча
ЗОНА АРДУИНО: домашнее задание к 06.01.18 читать обязательно про функции и про модернизацию форм управления все непонятные слова записать в тетрадь
ЗОНА АРДУИНО: домашнее задание к 16.12.17
словарик из Учим робота сделать поворот
ЗОНА АРДУИНО: домашнее задание к 09.12.17
словарик из ЗОНА АРДУИНО: учим робота
ЗОНА АРДУИНО: домашнее задание к занятию от 02.12.17
Подключение Arduino к компьютеру
Исследование нашего робота
Что такое сервопривод?
Подключение сервоприводов к Arduino
Условный оператор в ДРАКОНЕ
ARDUINO и ДРАКОН
Arduino Sensor Shield V5.0
ОПЫТ как работает ардуино
Исходная схема
 Мотор вращается только лишь тогда, когда нажата кнопка или дистанция до препятствия больше 100, светодиод мигает постоянно.
Мотор вращается только лишь тогда, когда нажата кнопка или дистанция до препятствия больше 100, светодиод мигает постоянно.
СКЕТЧ
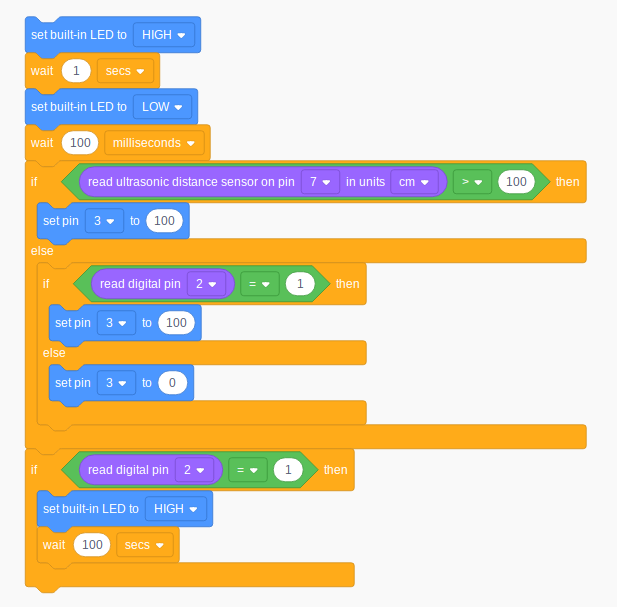

Скретч на ДРАКОНе

// ИС Дракон. Маршрутный транслятор.
// Y:\home\deniska\Документы\др длкр\Screch_Uno.drt
// 4. Схема - Гном, Изменение 09.11.2017 1:07:37
// 31. Модуль, Начало
//
// Y:\home\deniska\Документы\др длкр\Screch_Uno.drt
// 2. Схема - процедура, Изменение 09.11.2017 0:55:20, Начало
//
long readUltrasonicDistance(int pin)
{
// ==================== Шампур
// 17. Заголовок / long readUltrasonicDistance(int pin)
// 18. Вывод / Clear the trigger / Clear the trigger
pinMode(pin, OUTPUT);
// 19. Ввод / digitalWrite(pin, LOW); / digitalWrite(pin, LOW);
digitalWrite(pin, LOW);
// 20. Пауза / Sets the pin on HIGH state for 10 micro seconds
delayMicroseconds(2);
// 21. Ввод / digitalWrite(pin, HIGH); / digitalWrite(pin, HIGH);
digitalWrite(pin, HIGH);
// 22. Пауза / Sets the pin on HIGH state for 10 micro seconds
delayMicroseconds(10);
// 23. Ввод / digitalWrite(pin, LOW); / digitalWrite(pin, LOW);
digitalWrite(pin, LOW);
// 24. Ввод / Reads the pin, and returns the sound wave travel time in microseconds / Reads the pin, and returns the sound wave travel time in microseconds
pinMode(pin, INPUT);
// 25. Действие / return pulseIn(pin, HIGH);
return pulseIn(pin, HIGH);
// 26. Конец / Конец
// 2. Схема, Конец
//
}
// Y:\home\deniska\Документы\др длкр\Screch_Uno.drt
// 3. Схема - процедура, Изменение 09.11.2017 0:58:46, Начало
void setup()
{
// ==================== Шампур
// 27. Заголовок / VOID SETUP
// 28. Действие / setap
pinMode(13, OUTPUT);
pinMode(7, INPUT);
pinMode(3, OUTPUT);
pinMode(2, INPUT);
// 29. Конец / Конец
// 3. Схема, Конец
//
}
// Y:\home\deniska\Документы\др длкр\Screch_Uno.drt
// 1. Схема - процедура, Изменение 09.11.2017 18:28:51, Начало
void loop()
{
// ==================== Шампур
// 5. Заголовок / Scretch_Oun
// 6. Вывод / на сетодиод / 1
digitalWrite(13, HIGH);
// 7. Пауза / Wait for 2000 millisecond(s)
delay(2000);
// 8. Вывод / на светодиод / 0
digitalWrite(13, LOW);
// 9. Пауза / Wait for 2000 millisecond(s)
delay(2000);
// 10. Выбор / выбор воздействия
if ((digitalRead(2) == 1)) goto L15; // 14. ping-on
if ((0.01723 * readUltrasonicDistance(7) > 100)) goto L15; // 16. ping-dist
// 11. Вариант / ping
// 12. Вывод / мотор / 0
analogWrite(3, 0);
// 13. Конец / Конец
goto L_end1;
// ==================== Шампур
// 14. Вариант / ping-on
L15: ;
// 15. Вывод / мотор / 100
analogWrite(3, 100);
// ==================== Шампур
// 16. Вариант / ping-dist
// 1. Схема, Конец
L_end1: ;
//
}
// 31. Модуль, Конец
//