
Для работы кружка получены четыре набора шасси роботов, контроллер, плата управления моторами, ультрозвуковой дальномер и плата расширения микроконтроллера.





 Описание:
Описание:Название: Tower Pro
Модель: SG92R
Вес: 9г
Размеры: 23х12.2х27мм
Крутящий момент: 2.5кг/см(при напряжении 4.8V)
Рабочая скорость: 0.1сек/60о(при напрядении 4.8v)
Рабочее напряжение: 4.2V~6V
Рабочая температура: 0 °C~55 °C
Мертвая зона: 10мкс
Особенности:Цифровой микро сервопривод
Нейлоновый редуктор
Длина провода - 25 см
Тип соединения: JR

Ультрозвуковой дальномер

1. Принцип действия
На этот раз мы разберем работу одного из самых популярных датчиков — ультразвукового (УЗ) дальномера. Существует много разных модификаций подобных устройств, но все они работают по принципу измерения времени прохождения отраженного звука. То есть датчик отправляет звуковой сигнал в заданном направлении, затем ловит отраженное эхо и вычисляет время полета звука от датчика до препятствия и обратно.

Из школьного курса физики мы знаем, что скорость звука в некоторой среде величина постоянная, но зависящая от плотности среды. Зная скорость звука в воздухе и время полета звука до цели, мы можем рассчитать пройденное звуком расстояние по формуле:
s = v*t
где v — скорость звука в м/с, а t — время в секундах. Скорость звука в воздухе, кстати, равна 340.29 м/с.
Чтобы справиться со своей задачей, дальномер имеет две важные конструктивные особенности. Во-первых, чтобы звук хорошо отражался от препятствий, датчик испускает ультразвук с частотой 40 кГц. Для этого в датчике имеется пьезокерамический излучатель, который способен генерировать звук такой высокой частоты. Во-вторых, излучатель устроен таким образом, что звук распространяется не во все стороны (как это бывает у обычных динамиков), а в узком направлении. На рисунке представлена диаграмма направленности типичного УЗ дальномера.

Как видно на диаграмме, угол обзора самого простого УЗ дальномера составляет примерно 50-60 градусов. Для типичного варианта использования, когда датчик детектирует препятствия перед собой, такой угол обзора вполне пригоден. Ультразвук сможет обнаружить даже ножку стула, тогда как лазерный дальномер, к примеру, может её не заметить.
Если же мы решим сканировать окружающее пространство, вращая дальномер по кругу как радар, УЗ дальномер даст нам очень неточную и шумную картину. Для таких целей лучше использовать как раз лазерный дальномер.
Также следует отметить два серьезных недостатка УЗ дальномера. Первый заключается в том, что поверхности имеющие пористую структуру хорошо поглощают ультразвук, и датчик не может измерить расстояние до них. Например, если мы задумаем измерить расстояние от мультикоптера до поверхности поля с высокой травой, то скорее всего получим очень нечеткие данные. Такие же проблемы нас ждут при измерении дистанции до стены покрытой поролоном.
Второй недостаток связан со скоростью звуковой волны. Эта скорость недостаточно высока, чтобы сделать процесс измерения более частым. Допустим, перед роботом есть препятствие на удалении 4 метра. Чтобы звук слетал туда и обратно, потребуется целых 24 мс. Следует 7 раз отмерить, прежде чем ставить УЗ дальномер на летающих роботов.
2. Ультразвуковой дальномер HC-SR04
В этом уроке мы будем работать с датчиком HC-SR04 и контроллером Ардуино Уно. Этот популярный дальномер умеет измерять расстояние от 1-2 см до 4-6 метров. При этом, точность измерения составляет 0.5 — 1 см.
Итак, попробуем приказать датчику отправить зондирующий ультразвуковой импульс, а затем зафиксируем его возвращение. Посмотрим как выглядит временная диаграмма работы HC-SR04.

На диаграмме видно, что для начала измерения нам необходимо сгенерировать на выводе Trig положительный импульс длиной 10 мкс. Вслед за этим, датчик выпустит серию из 8 импульсов и поднимет уровень на выводе Echo, перейдя при этом в режим ожидания отраженного сигнала. Как только дальномер почувствует, что звук вернулся, он завершит положительный импульс на Echo.
Получается, что нам нужно сделать всего две вещи: создать импульс на Trig для начала измерения, и замерить длину импульса на Echo, чтобы потом вычислить дистанцию по нехитрой формуле. Делаем.
int echoPin = 2;
int trigPin = 3;
void setup() {
Serial.begin (9600);
pinMode(trigPin, OUTPUT);
pinMode(echoPin, INPUT);
}
void loop() {
int duration, cm;
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
duration = pulseIn(echoPin, HIGH);
cm = duration / 58;
Serial.print(cm);
Serial.println(" cm");
delay(100);
}
Функция pulseIn замеряет длину положительного импульса на ноге echoPin в микросекундах. В программе мы записываем время полета звука в переменную duration. Как мы уже выяснили ранее, нам потребуется умножить время на скорость звука:
s = duration * v = duration * 340 м/с
Переводим скорость звука из м/с в см/мкс:
s = duration * 0.034 м/мкс
Для удобства преобразуем десятичную дробь в обыкновенную:
s = duration * 1/29 = duration / 29
А теперь вспомним, что звук прошел два искомых расстояния: до цели и обратно. Поделим всё на 2:
s = duration / 58
Теперь мы знаем откуда взялось число 58 в программе!
Микросхема управления двигателями


Шасси состоят из рамы двух электродвигателей, поворотного колеса и двух больших колес.
DC 3V - 6В
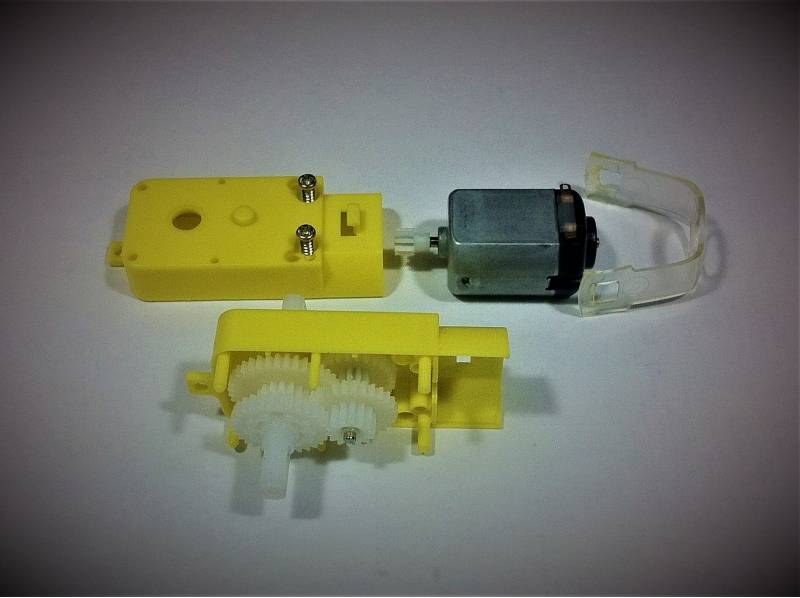
Спецификация:
Сильный магнитный с анти-помех
Двухместный ось мотор-редуктор
Передаточное отношение: 1:48
Рабочее напряжение: 3V ~ 6В
Выгрузка ток: ≤ 200 мА @ 6В, ≤ 150 мА @ 3V
Выгружает скорость: 200 ± 10% RPM @ 6В, 90 ± 10% RPM @ 3В