БЛОК УПРАВЛЕНИЯ РОБОТА
На прошлом задании мы создали вируальную электрическую цепь, которая моделирует поведение нашего робота. Собранная по электрической схеме цепь включает, как актюатор, датчик так и блок управления. Но если с датчиком все просто, он фактически заменяет кнопку запуска и остановки робота - пока кнопка нажата робот работает, то блок управления нужно рассмотреть подробнее.
В нашем устройстве управление сводиться к почередной подаче и отключения электрического тока на входы актюатора. Так как электрическая нагрузка актюатора незначительная, то можно подавать электрический ток прямо с устройства управления, в данном случае развязка слабо-сильной электрической цепи управления и управляемую электрическую сеть большой мощности ненужна.
В нашем случае устройством управления становиться микроконтролер ARDUINO UNO R3. Микроконтроллер - Микроконтро́ллер (англ. Micro Controller Unit, MCU) — микросхема, предназначенная для управления электронными устройствами. Интегра́льная (микро)схе́ма (ИС, ИМС, IC (англ.)), микросхе́ма, м/сх, чип (англ. chip «тонкая пластинка»: первоначально термин относился к пластинке кристалла микросхемы) — микроэлектронное устройство — электронная схема произвольной сложности (кристалл), изготовленная на полупроводниковой подложке (пластине или плёнке) и помещённая в неразборный корпус или без такового в случае вхождения в состав микросборки.



Проведем замер силы электрического тока при использовании светодиода. С порта выхода микроконтроллера(МК) снимается напряжение (при сигнале = 1) в интервале 2,5 - 5 вольт, а сила тока примем 20 милиампер. Можно высчитать сопротивление нагрузки, которое буде равно напряжение снимаемому с точки выхода МК поделенное на силу тока, итого получим сопративление нагрузки не менее 150 ом.
Теперь поговорим более подробно о портах микроконтроллера.
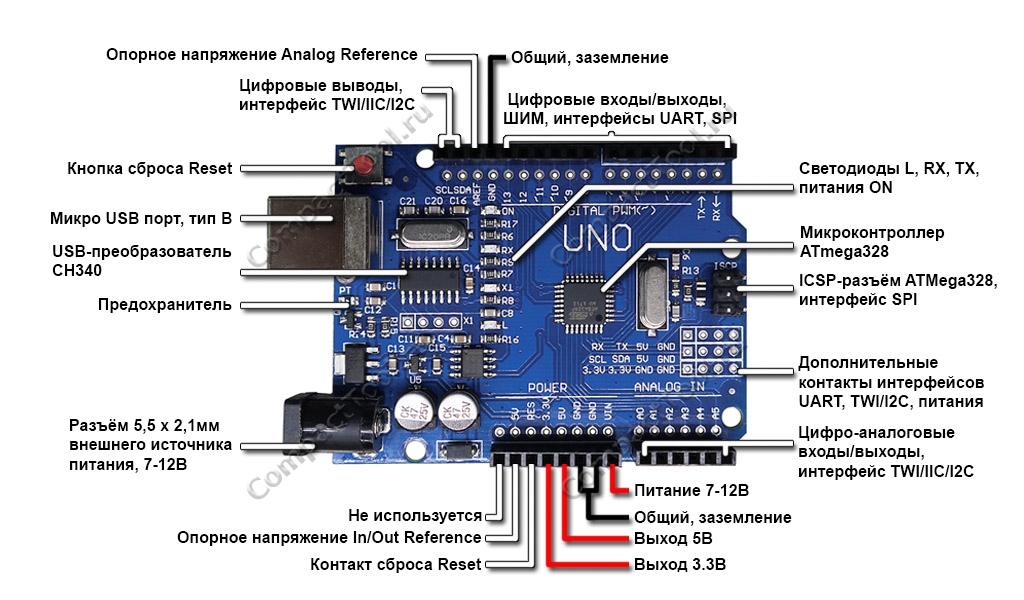
Теперь вам должна быть понятна коммутация актюатора.
Так, с точками подключения разобрались, но при подаче питания ничего работать не будет. А почему? Правильно, устройство управления должно выполнять некую инструкцию, алгоритм. В нашем случае ему(МК) нужно поочередно подавать и снимать напряжение на точки управления актюатора, но сам по себе блок управления командовать не будет, ему нуно записать инстукцию работы(алгоритм) на понятном ему МК языке, тоесть написать программу и загрузить ее в блок управления(МК). А вот как это сделать рассмотрим на следующем занятии.